官方网站")
高动态和大带宽MEG的新一代OPM:4He OPMs--健康志愿者中的首个应用
论文原文参见://www.mdpi.com/1424-8220/23/5/2801
摘要
磁脑图(MEG)提供了一种在毫秒时间尺度上测量大脑电活动的方法。通过这些信号,可以非侵入性地推导出大脑活动的动力学。传统的MEG系统(SQUID-MEG)使用极低的温度来实现必要的灵敏度。这导致了严重的实验和经济限制。新一代MEG传感器正在崛起:光泵浦磁计(OPM)。在OPM中,一个封闭在玻璃细胞中的原子气体,被一个激光束穿过,该激光束的调制取决于局部磁场。MAG4Health正在开发使用氦气的OPMs(4He-OPM)。它们在室温下工作,具有大的动态范围和大的频带宽度,并本地输出一个三维向量的磁场测量。在这项研究中,将5个4He-OPMs与18名志愿者中的一个经典的SQUID-MEG系统进行比较,以评估它们的实验性能。考虑到4He-OPMs在真正的室温下工作,并且可以直接放在头上,我们的假设是4He-OPMs将提供可靠的生理磁性脑活动记录。实际上,结果表明,尽管灵敏度较低,4He-OPMs通过利用与脑的距离更近的优势,显示出与传统的SQUID-MEG系统非常相似的结果。
关键词: OPM; MEG; SQUID; 脑活动; 原子磁力计; 氦OPM; 神经影像学
1. 简介
脑磁图(MEG)是一种非侵入性的功能成像技术,可提供毫秒时间尺度下神经活动的直接测量。通过这些信号,可以推导出正常或病态大脑网络的动态[1]。传统的MEG系统(SQUID-MEG)使用超导量子干涉装置(SQUIDs)来达到足够的灵敏度以绘制大脑活动的图像[2]。然而,SQUIDs需要非常低的温度(4.2 K),这是使用液氦实现的。除了非常高昂的成本和强烈的环境影响外,它还导致了严重的实验限制:传感器被封闭在一个刚性的杜瓦壶内,其内部有一个真空空间将传感器与头皮隔开。因此,头盔无法适应给定头部的几何形状。成人的传感器到大脑的距离约为3厘米,并且对于较小的头部,该距离会增加,从而导致记录信号的强度显著降低。被试者的头部与传感器不固定,任何移动都可能显著降低数据质量。SQUID-MEG系统笨重,使实验环境不自然,并严重限制了可以使用的实验范式。这些限制阻碍了许多受试者群体使用MEG,包括儿童和患有各种疾病的患者。
新一代的脑磁图(MEG)传感器正在崛起:光泵磁力计(OPM)。在OPM中,一个封闭在玻璃小室内的原子气体被激光束穿过,其调制取决于当地的磁场。
**个研发的OPM是以碱为基础的[3]。它们具有非常好的敏感度(在双轴模式下为15 fT /√Hz),并可以放置在头皮附近,潜在地允许神经磁活动记录的信号功率增加三到八倍[4、5、6、7]。这些传感器已经成功地用于包括儿童和成人在内的健康志愿者[8、9、10、11]和患者[12、13]的广泛实验研究。领域的完整综述可以在[14,15]中找到。请注意,这些研究还表明,这些OPM传感器可以很容易地用于比经典SQUID传感器更广泛的应用领域,例如记录脊柱或视网膜活动[16,17]。与经典MEG相比,这些传感器的优点在于输出多轴的大脑磁场测量值,由于更好地描述了磁场中的高空间频率结构,因此有可能获得以前没有记录的大脑活动[7,8,18]。碱在室温下处于固态,需要加热到150℃以上才能产生碱蒸气并实现其工作模式。因此,它们每个传感器散发0.7瓦的能量。它们具有有限的带宽(1-100 Hz)和小的动态范围(5 nT)。这需要使用优化的屏蔽房间来减少残余磁场[11,19,20]。这可能会强制使用一个附加的场消除线圈系统围绕患者的头部来补偿在磁屏蔽房间内剩余的磁场,以减少阵列内传感器之间的交叉轴投影误差和不均匀性[7,19,21,22,23],取决于环境噪声和被试者的运动水平。
最近,出现了一个有前途的用于替代碱金属OPMs的选择:MAG4Health正在开发使用氦气(4He-OPM)的OPMs [24]。 4He-OPMs已成功应用于记录脑磁场[25]。 4He-OPMs本身输出磁场的三维矢量测量。 它们具有以下关键优势:(i) 4He-OPMs在室温下运行而不需要加热(氦气在室温下是气体),因此没有明显的热耗散(每个传感器为0.02W); (ii) 4He-OPMs具有大的共振线宽,与闭环控制相结合使得它们具有大动态范围,可用于轻量级屏蔽和被测物体的运动(>200nT),以及适用于大脑电活动的大频带宽度(0-2000 Hz)。闭环控制通过在三个轴上施加相反的补偿场连续地抵消每个传感器的磁场的三个分量。这种特定的操作模式保证了数组内非常稳定和均匀的传感器精度,并有助于实现大的动态范围。
用于脑电图记录概念验证的**版的4He-OPMs [25]的主要缺点是其灵敏度较低(200 fT/√Hz)。然而,MAG4Health在这方面取得了显着进展。最近的结果显示,4He-OPMs现在在三个轴中的两个轴上的灵敏度达到了45 fT/√Hz以上,1/f噪声上升非常有限 [26]。目前,该传感器被封装在一种光敏树脂材料制成的3D打印支架中,占地面积为2×2×5厘米,重量为45克(不含电缆)。在本研究中,电缆由固定在受试者椅子上的木框架支撑。
本研究共测试了五个4He-OPMs。我们的主要目标是比较这些新型4He-OPMs传感器与我们传统的SQUID-MEG系统的实验表现,以评估它们在较大的样本中(包括18名健康志愿者)的表现情况。考虑到4He-OPMs在实际室温下(无加热、无冷却)运行,并且可以直接放置在被试的头部上,我们的假设是,当前版本的4He-OPMs将提供可靠的生理磁性脑活动记录。实际上,结果表明,尽管4He-OPMs具有较低的灵敏度和降噪潜力受到传感器数量较少的限制,但由于离大脑的距离较近,它们仍然可以产生与传统的SQUID-MEG系统非常相似的结果。
2. 材料和方法
2.1. 数据采集
所有MEG数据是在一个标准的磁屏蔽室(2 µ金属层,1铜层,Vacuumschmelze,Hanau,德国)中收集的,没有任何主动屏蔽。该室的背景磁场约为20 nT。
2.2. 经典SQUID-MEG
记录是用一个275个SQUID轴向梯度计MEG系统(CTF MEG Neuro Innovations Inc.,Port Coquitlam,BC,Canada)进行的。被试者舒适地坐着,头部被充气垫固定。对于体感实验,MEG信号以2 kHz进行数字化,使用600 Hz低通滤波器,在视觉实验中,MEG信号以1 kHz进行数字化,使用300 Hz低通滤波器。
2.3. 4He-OPMs
采用新开发的4He-OPM传感器对脑部磁场进行记录,该传感器可以沿着3个轴(1个径向和2个切向)测量脑磁场,并进行持续自我补偿[26]。脑磁场测量基于4He原子电子自旋偏离激光泵浦所 imposed 的方向造成的光强调制测量。本研究中使用的4He-OPMs阵列由5个基于4He亚稳态原子近似为零磁场下的4He原子的参数共振的光泵浦磁强计组成[27,28,29]。包含4He气体原子的小单元的尺寸为圆柱形,内径为1厘米,内高为1厘米。传感器底部被小型3轴Helmholtz线圈所包围,用于施加RF场和补偿场。目前,4He-OPMs的动态范围为±250 nT。闭环三轴模式下磁强计的灵敏度在三轴中有两个轴(一个径向和一个切向)上均优于45 fT/√Hz,带宽从直流到2 kHz。第三个轴(径向)的灵敏度较低,是前两个轴的四倍(200 fT/√Hz)。有关传感器的更详细描述可在附录B和以前的出版物[26]中找到。由于灵敏度在三个轴中有两个轴上**,因此所有分析都在这两个轴上进行。
被试者舒适地坐在椅子上,戴着一个可调节头戴式耳机,包括96个四氦-OPM传感器的位置(见图1)。虽然允许头部移动,但要求被试者尽量避免大幅度的头部运动。一个四氦-OPM传感器位于被试者头部上方10厘米处作为参考传感器,测量MSR中的环境噪声和由被试者运动产生的磁性伪影。参考传感器固定在柱子顶部,柱子放置在头戴式耳机的Cz槽上。对于体感实验,其余四个四氦-OPM传感器位于体感区域周围的LC11、LC13、LC31和LC33位置(见图1)。对于视觉实验,其余四个四氦-OPM传感器位于主视觉区域周围的LO11、LO31、RO11和RO31位置(见图1)。信号采样频率为11kHz。没有被试者报告关于系统重量的不适。三分之一的被试者提到与电缆相关的张力/牵引以及它们固定在木制支架上限制了他们的运动自由。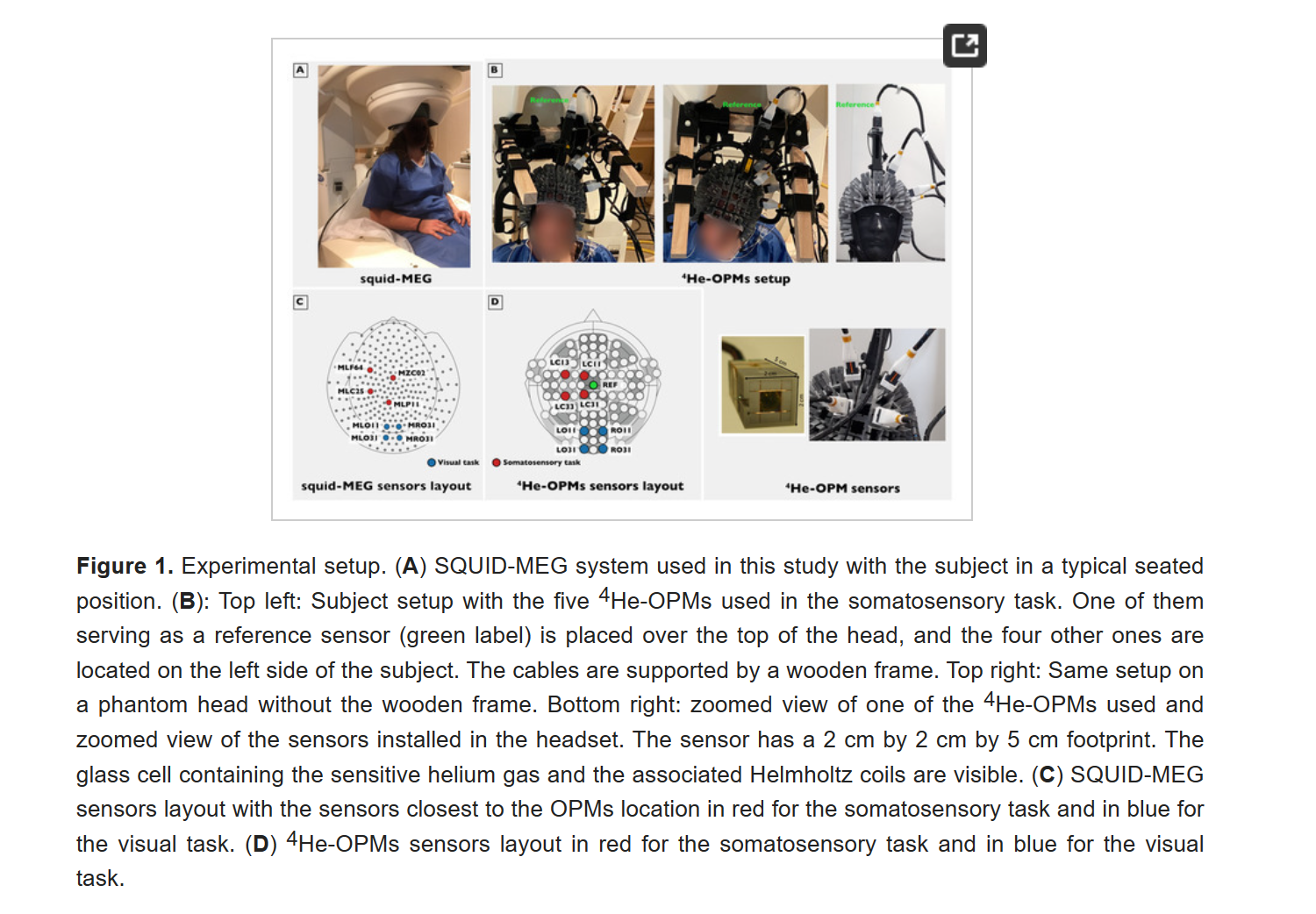
2.4. 参与者和实验设计
本研究得到了法国监管和伦理管理部门的批准(IDRCB n° 2020-A01830-39)。受试者在参与前签署了一份书面知情同意书。该研究包括18名健康受试者参加两项任务:体感刺激环节(17名受试者)和视觉刺激环节(所有18名受试者)。所有参与者的年龄为18-60岁(平均34.2岁,中位数8.2岁)。他们没有神经或精神疾病史,也没有服用任何对中枢神经系统有效的药物。
触觉实验:使用直接连接到电刺激器(Astro-Med公司的S88刺激器,GRASS,W. Warwick,RI,美国)的双极电极经皮刺激右手腕的正中神经。确定了每个受试者的运动阈值(MT,产生拇指运动所需的最小刺激强度),实验刺激强度设置为MT + 10% [30]。提供了800次刺激(0.5毫秒的电击),间隔时间在350至450毫秒之间随机变化。在观看无声电影时,要求受试者保持睁眼状态。
视觉实验:在中央视线固定基线后(1.2秒±0.2秒),使用Propixx视频投影仪(VPixx,加拿大圣布鲁诺)在距离82厘米处向受试者中央呈现直径为4度的Gabor视觉刺激,刺激的空间频率为全对比度下每个刺激横跨12个周期,每度3个周期。使用2键响应板,指导被试判断Gabor相对于参考方向的方向差异,可能是大的(25度,被视为“简单的”)或小的(15度,被视为“难的”)。因此,共有4种类型的刺激,尽管在当前分析中没有进行区分。当响应给出或最多2.5秒时,刺激仍保持在屏幕上。实验总共包括900次试验。方向任务确保了一定和可靠的注意力水平。值得注意的是,4种类型的刺激之间的转换概率被进一步操纵,但此类操纵的效果在此不作分析。
2.5. 数据分析
所有数据都在Linux环境下使用MNE-python软件(版本1.1.1 [31])进行分析,并尽可能使SQUID-MEG和4He-OPM数据相似,同时针对每种模式进行数据质量的优化。对于这两种数据集,收集期间持续超过9秒的中断以及快速振幅偏差(大于3个标准差的采样间隔)都被标记为需要忽略。由于4He-OPM数据中存在低频漂移,因此还需要移除相对于信号平均值大于5个标准差(慢的)振幅偏差。对于SQUID-MEG数据,则应用了第三阶梯度补偿[32]。只用于ICA分解的数据被降采样到500Hz,并在1-100Hz之间带通滤波。与眼动、眨眼、心跳和明显非神经因素有关的ICA成分被移除。对于SQUID-MEG数据,平均移除了4.8(4.5 / 5.2个有关体感/视觉的成分),而对于4He-OPMs,两个任务均移除了2.8个成分。由于数据中传感器数量的增加,可以更好地确定与眼睛和心脏相关的伪影类型,因此SQUID-MEG的拒绝成分数量增加。对于体感任务,刺激伪影通过在刺激(t=0 s)前后10ms的平均插值来移除。随后将数据带通滤波在1-100Hz之间,同时在50Hz和100Hz处进行附加的线噪声过滤。对于视觉任务,通过获取眼电图(EOG)记录,用作残余眼动相关伪影的控制回归因子。此外,对于两个任务中的4He-OPM数据,从参考传感器中提取径向和一个切向轴数据,用作非神经环境噪声的控制回归因子。
诱发场:对于触觉任务,数据被分成了100毫秒基线和250毫秒刺激后段;对于视觉任务,数据被分成了200毫秒基线和500毫秒刺激后段。对于SQUID-MEG数据,进一步的分析**于距离4He-OPM电极阵列位置最接近的4个传感器。为了找到这些最接近的传感器,使用Polhemus系统在1个被用作模板的受试者中将OPM头戴式设备的96个可能位置数字化成SQUID-MEG受试者参考框架(基于三个标记点:鼻子、左右耳前点)。对于触觉任务,这些传感器是MLC25、MLF64、MZC02和MLP11;对于视觉任务,这些传感器是MRO31、MRO11、MLO31和MLO11(详见图1的CTF传感器布局)。使用MNE软件的autoreject包(版本0.4 [33])拒绝含有明显伪迹的时段。拒绝的试验总比例被强制保持在70%或更低,以确保质量评估所需的试验数量足够。对于触觉任务,平均保留了93.8%或750个SQUID-MEG试验和88.2%或705个4He-OPM试验。对于视觉任务,平均保留了96.0%(921个)SQUID-MEG数据和81.7%(784个)4He-OPM数据。注意,对于4He-OPM数据,拒绝是基于**表现的两个轴(径向和一个切向)的结果。
振荡功率:为了测试传感器在振荡脑动力学中的表现,选择视觉任务,因为它具有较长的时间窗口和已建立的预期振荡模式,即刺激引起的alpha频带(8-13 Hz)振荡降低和增加的gamma频带(〜30-80 Hz)振荡[34]。因此,仅针对视觉任务,选择稍长的时间窗口(相对于诱发场分析)来计算振荡功率[−0.6 s,0.6 s]以避免边缘伪影。然后使用长度固定为250 ms的 Morlet小波计算2-100 Hz范围内的振荡功率。用两个尾巴的基于聚类的置换[35]测试计算刺激后的统计显着性,在基线间隔[−0.4 s,0 s]和刺激后时间窗口[0 s,0.4 s]之间进行1000个排列和初始聚簇阈值为p = 0.05。
信噪比(SNR)被计算为诱发反应在刺激后时间间隔(感觉皮肤刺激为[0.02秒,0.25秒], 视觉刺激为[0秒,0.3秒])内的**绝对值与基线平均值(感觉皮肤刺激为[−0.1秒,−0.02秒], 视觉刺激为 [−0.2秒,0秒])标准误差之比。时间窗口被选择为尽可能长,同时避免人为污染。请注意,视觉任务中没有延迟反应,并且反应开始在> 300毫秒后发生。 SNR值针对每个传感器和每个被试个体计算。为了确保可比较的估计,通过从包含更多试验的模态中选取一组试验,根据个人数据集中的试验数量纠正了SNR估计。这被重复了(1000次迭代)以消除选择偏向。
空房间录制: 为了量化SQUID-MEG和4He-OPMs传感器的原始性能,我们进行了空房间录制,采用与上述相同的采集参数,**不同之处在于录制持续时间设置为30秒。然后将这些SQUID-MEG和4He-OPMs信号带通滤波在1Hz和300Hz之间,并在50Hz处施加陷波滤波器。针对每个传感器,使用Welch方法计算PSD。然后对SQUID-MEG和4He-OPMs分别计算平均灵敏度值,通过对传感器和频率带5Hz至90Hz进行PSD平均值计算。请注意,为了比较目的,还计算了视觉任务在刺激前500毫秒的基线PSD。
3. 结果
3.1. 空房间实验结果
4He-OPMs的空房间记录显示平均PSD值为42.65 ± 2.97 fT/√Hz,SQUID-MEG的平均PSD值为3.36 ± 1.08 fT/√Hz。图2显示,两种传感器在整个频带(高达300 Hz)内保持其相应的灵敏度。除了4He-OPMs的PSD上额外出现一个约130 Hz的峰外,在同一频率上,由电力线(及其谐波)和其他环境因素引起的相似峰出现在两种PSD上相同的频率。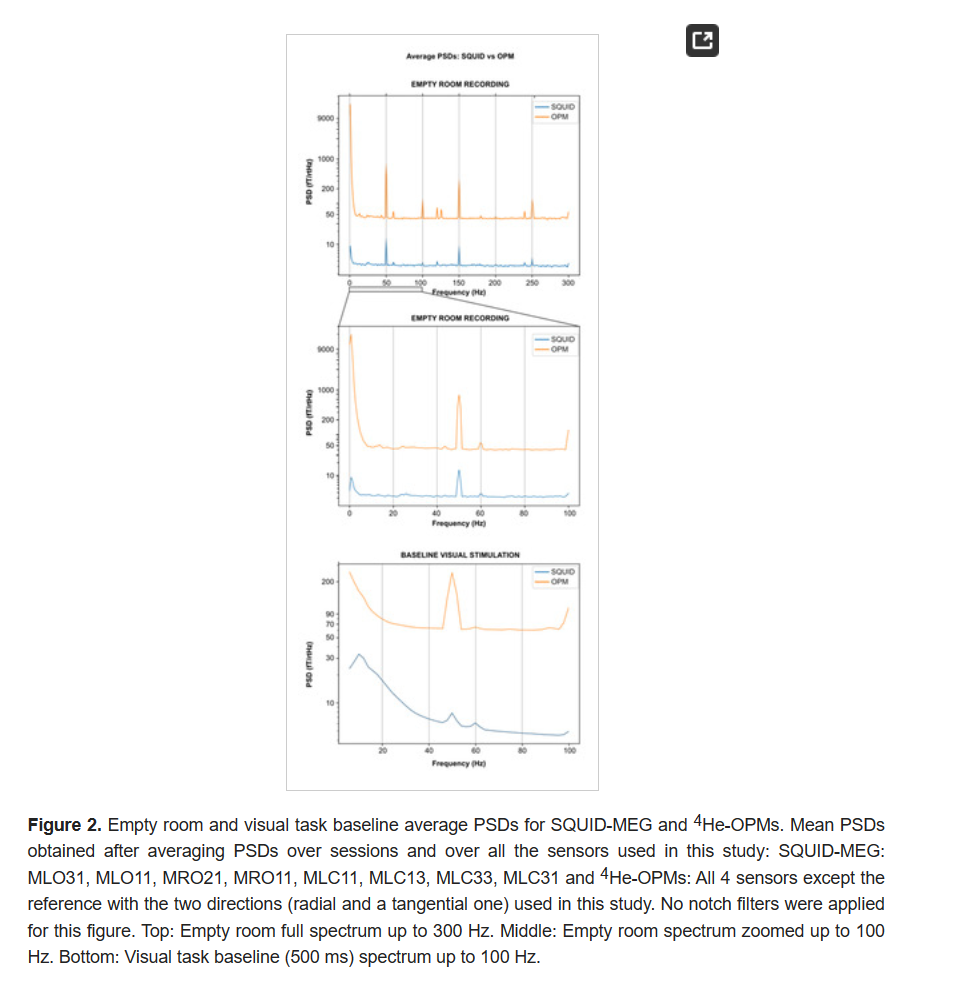
3.2. 体感刺激
事件相关场。图3展示了在位于体感皮层以上的传感器下对正中神经刺激的群体平均响应,其中包括了SQUID-MEG和4He-OPMs的测量结果,揭示出它们的时间变化非常相似。SQUID-MEG和4He-OPMs的RMS时间序列在滞后为零时的皮尔逊积矩相关系数分别为r = 0.91和r = 0.92(径向和切向分量),表明它们之间存在非常高的相似性。在对体感刺激的响应中,我们观察到了体感诱发场,有20, 35, 80和135 ms的偏转(对于SQUID-MEG,为21/36/79/135 ms;对于径向4He-OPMs,为20/34/84/136 ms;对于切向4He-OPMs,为20/36/80/135 ms),这与ERP文献中的N20、P35和N130偏转一致[36,37]。4He-OPMs的平均**偏转值达到了328 fT,而SQUID-MEG的值为71 fT,相当于增加了4.5倍以上。这与我们对4He-OPM传感器的预期相符,因为它靠近头皮。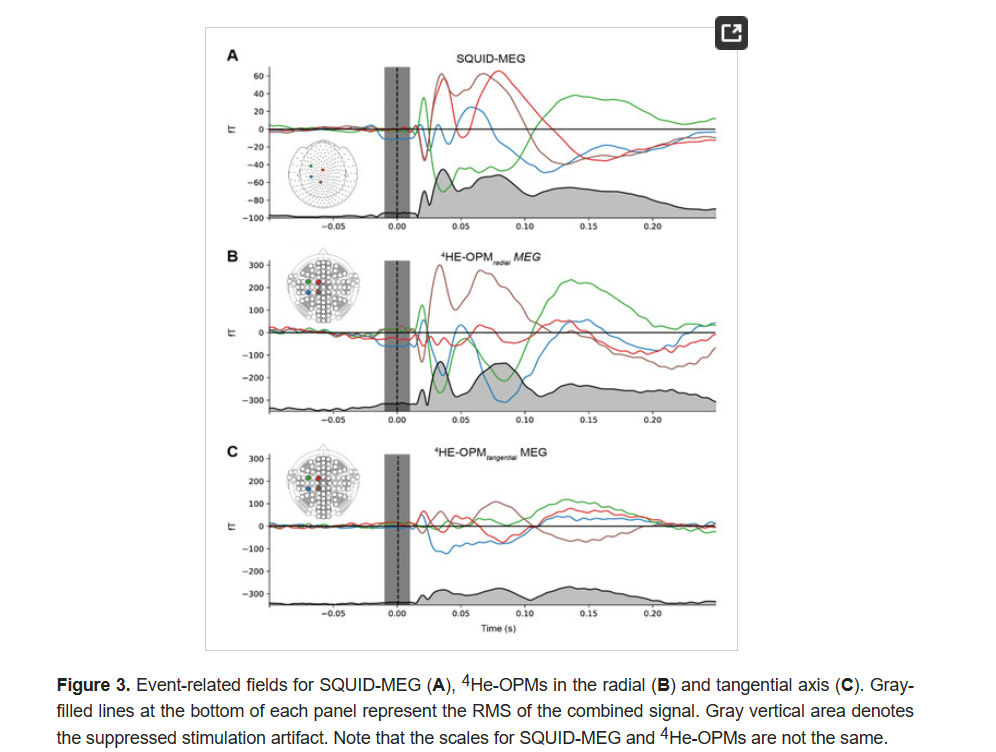
图4直接比较了SQUID和4He-OPMs传感器的事件相关场。对于每个受试者,选择了具有最高信噪比的SQUID和4He-OPMs传感器(包括径向和切向方向)。前三个面板显示了具有不同程度与SQUID-MEG信号相符的个体结果。可以看到,在噪声水平较低时,传感器类型之间存在很高的相应程度,这表明在理想情况下可以获得几乎相同的结果。这得到了时间序列之间高度相关的支持(高达r = 0.95),尽管个体差异可能很大(见附录A图A1以获取所有受试者的概述)。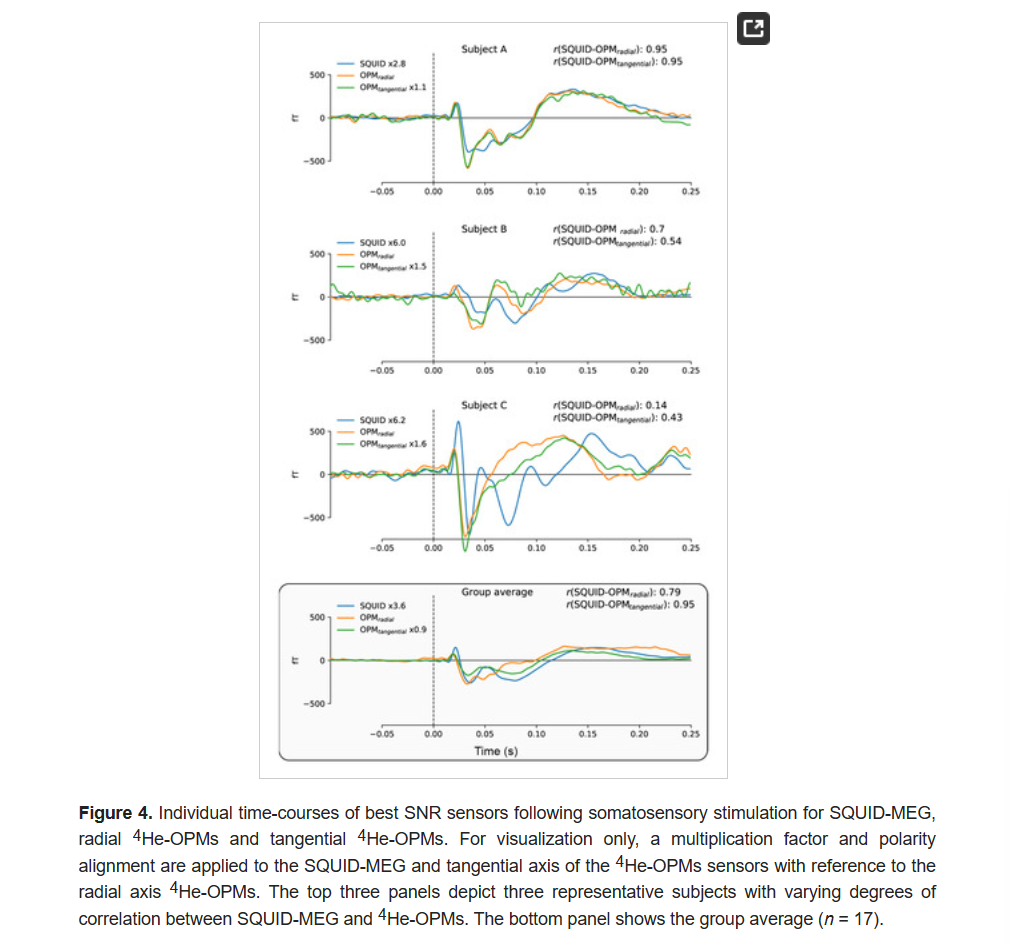
信噪比。为了评估从SQUID-MEG和OPM-MEG测量中获取的数据质量,对每种模态和传感器类型计算了信噪比(SNR)。如图5所示,SNR值显示SQUID-MEG和4He-OPMs之间存在明显的重叠,尤其是对于径向轴(SNR 18.2 SD 8.2)。SQUID-MEG受益于最高的SNR值(26.5 SD 11.0),但在受试者之间显示出**的范围差异。这种差异是显著的(成对样本t检验:t = 3.72,p < 0.005)。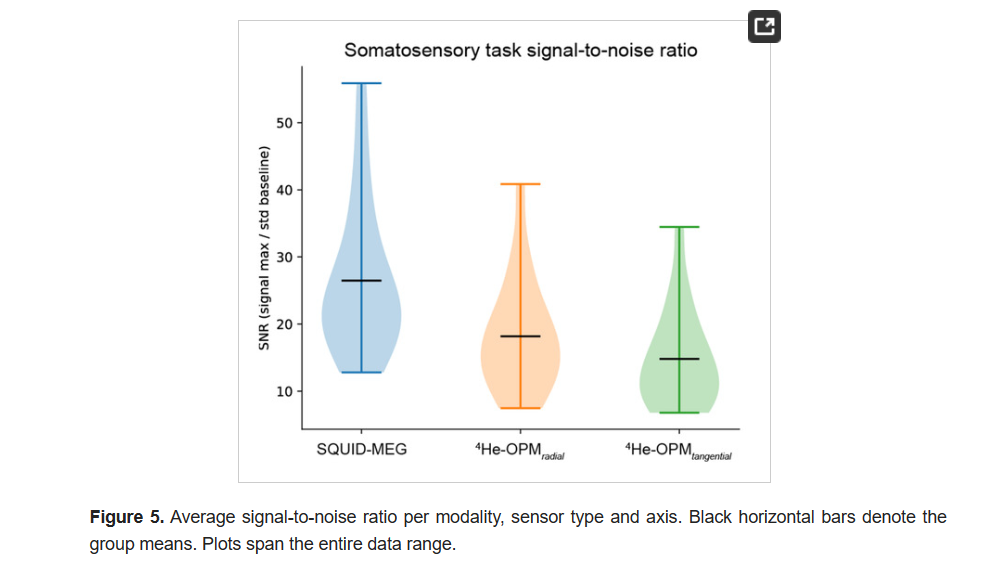
3.3. 视觉刺激实验
事件相关场。对于视觉刺激任务,组平均时间曲线如图6所示。视觉刺激的开始时间为t = 0。传感器位于左右视觉区域的上方。在Gabor条纹的开始刺激下,可以可靠地观察到清晰的事件相关场,峰值约在100毫秒左右,相应于预期的P100 [38],在所有传感器上都能观察到。对于SQUID-MEG,平均潜伏期为89毫秒,对于4He-OPMs,径向和切向分量的潜伏期分别为85和77毫秒。平均潜伏期的差异不显著。P100的Squid-MEG**振幅可达到65 fT,而4He-OPMs传感器的径向和切向分量显示偏转振幅分别为248 fT和270 fT,增加了3.8至4.1倍。进一步峰值发生在200和300毫秒左右(对于SQUID-MEG为200毫秒和321毫秒),只能可靠地检测到切向4He-OPMs轴(在224毫秒和346毫秒)。同样,RMS时间曲线的交叉相关性显示出SQUID-MEG和4He-OPMs径向分量之间的相关性为0.80和0.71的切向分量。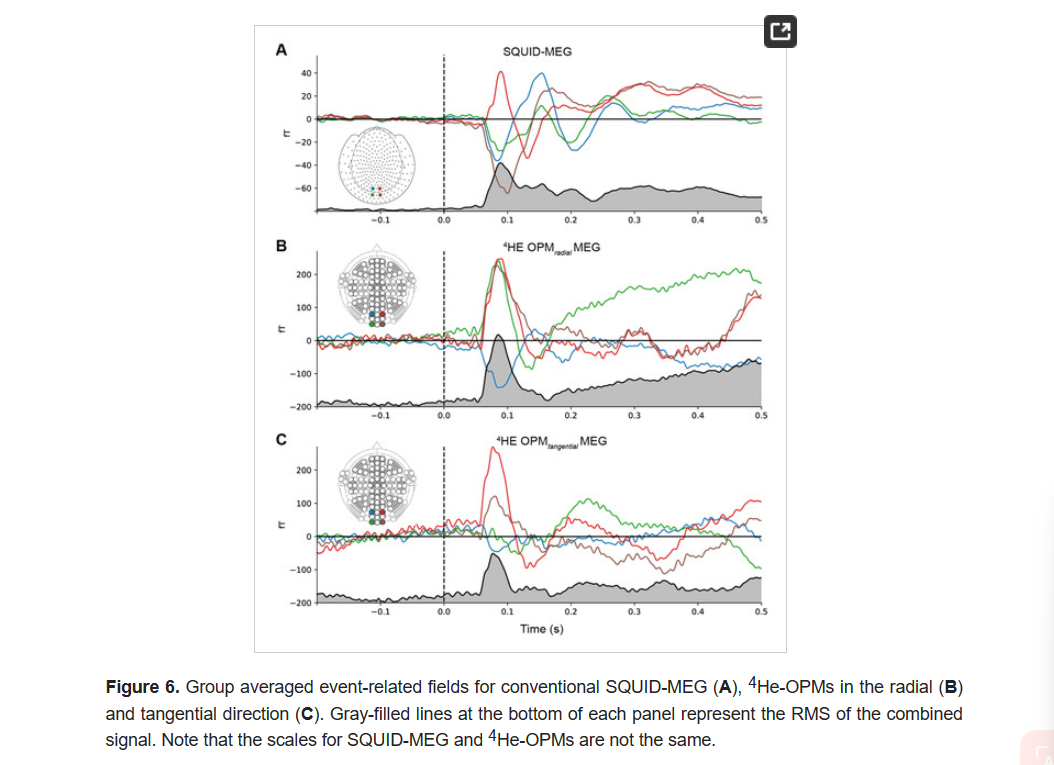
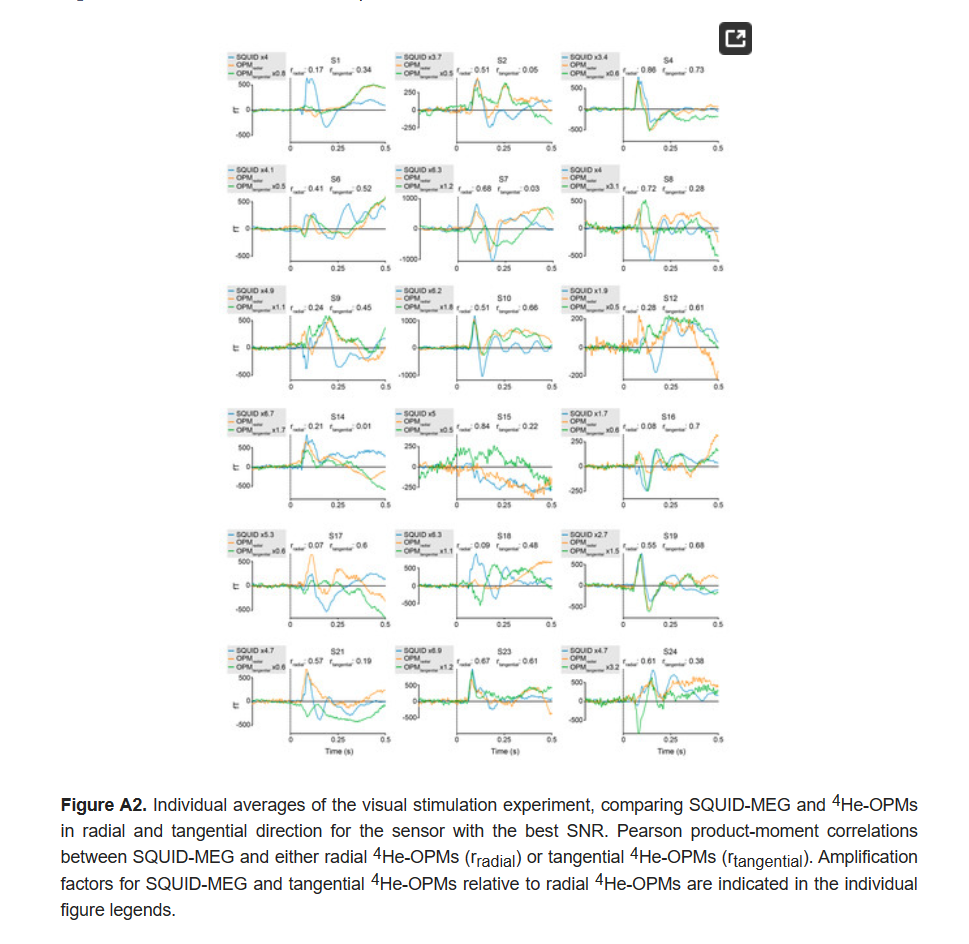
图7直接比较了SQUID和4He-OPMs传感器在视觉刺激任务中的事件相关场。对于每个受试者,选择具有最高信噪比的SQUID和4He-OPMs传感器(分别在径向和切向方向)。前三个面板显示了不同程度与SQUID-MEG信号对应的单个结果。当噪声水平较低时,传感器类型之间存在高水平的一致性,相关系数高达r=0.86。有关所有受试者的完整概述和估计受试者之间的可变性,请参见附录A中的图A2。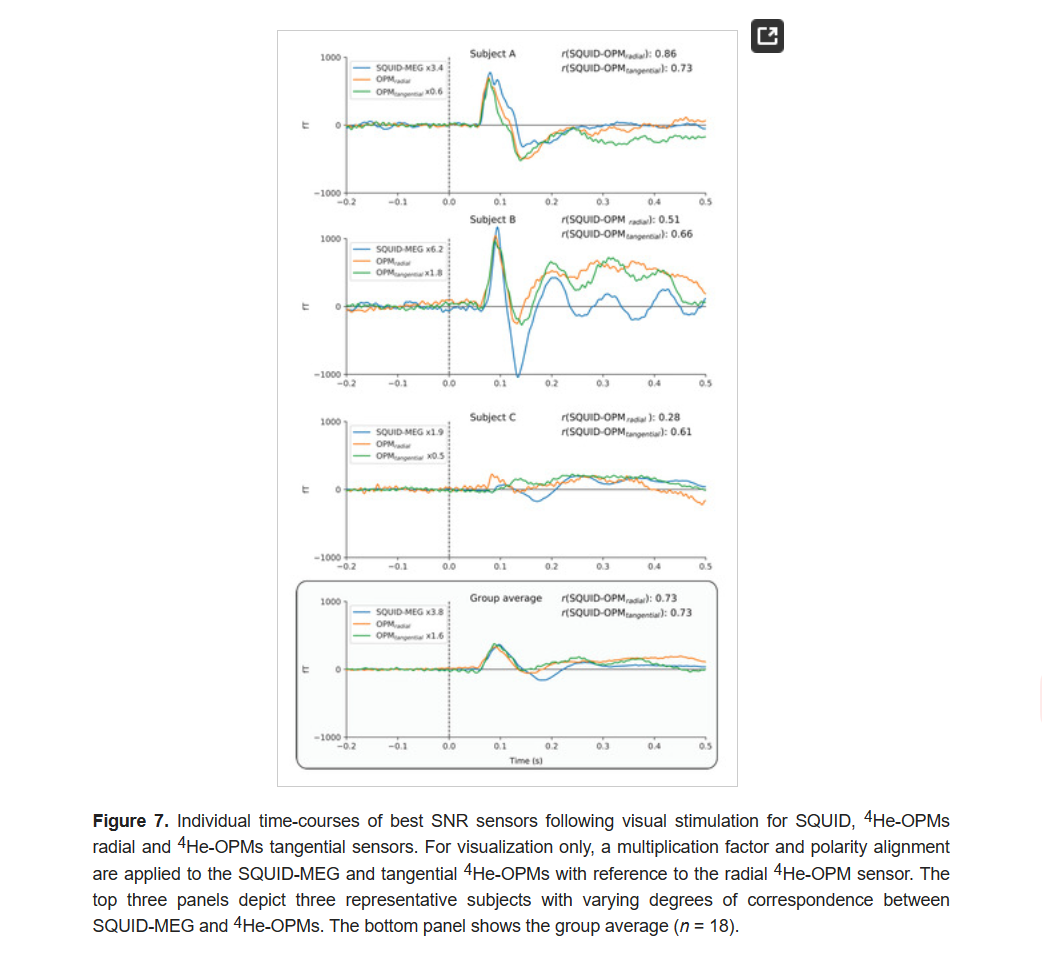
信噪比。如图8所示,SQUID-MEG和4He-OPMs之间的SNR值再次显示出明显的重叠。对于视觉任务,4He-OPM的SNR略低于体感任务(径向轴的SNR为14.1 SD 4.9),虽然两个轴的SNR几乎相等。 SQUID-MEG具有最高的SNR(26.0 SD 8.4)。这种差异是显著的(成对样本t检验:t = 5.8,p <0.001)。请注意,这里的SQUID-MEG SNR范围大于OPM传感器的范围。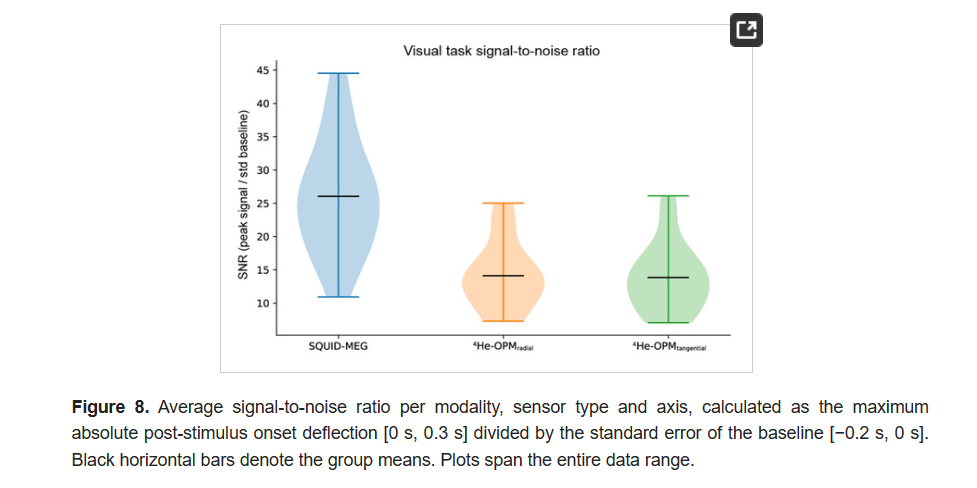
振荡功率。图9显示了SQUID-MEG和4He-OPM在视觉任务中的时间-频率表示。相对于基线,显著的聚集区以黑色标记。 SQUID-MEG和4He-OPMs都显示出α/β(8-30 Hz)范围的刺激后降低以及同时升高的γ(> 40 Hz)响应,这与呈现视觉Gabor刺激所期望的相似。虽然4He-OPM传感器中的γ响应低于SQUID传感器中的γ响应,但在核心γ响应频率处仍有显著功率,特别是在径向分量中表现出3522集团的新网站的响应。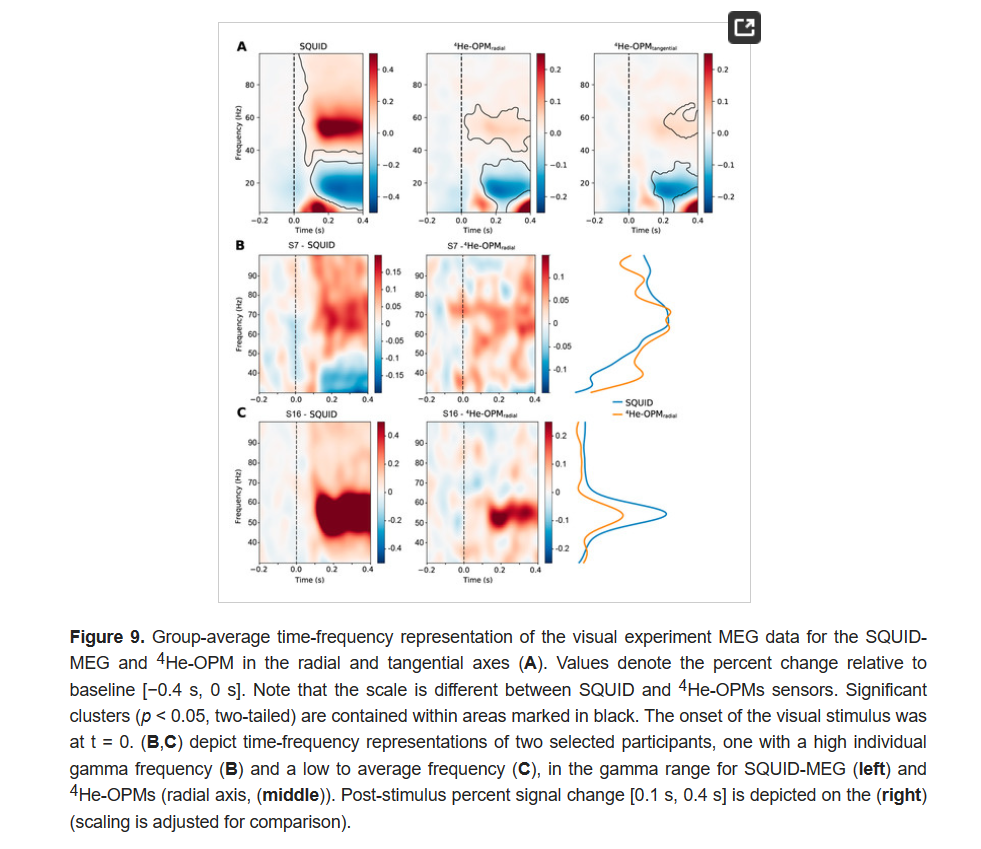
4. 讨论
在这里,我们使用体感和视觉刺激范例对传统的低温 SQUID-MEG 和新开发的可穿戴室温 4He-OPM 传感器进行直接比较。结果表明,这两种模式之间存在令人鼓舞的相似性,并且比 4He-OPMs 传感器先前的结果有了显着改进。
相对于描述在[25]中的上一代4He-OPM传感器,已经取得了相当大的进展。 4He-OPM传感器在三个轴的测量灵敏度小于43 fT /√Hz,比之前报道的200 fT /√Hz更好。使用4He-OPM传感器记录的事件相关电位显示出与SQUID-MEG相比振幅增加了3.8至4.5倍,这符合由于4He-OPM传感器距离头皮较近而预期的增益,并且等于或高于报道的碱金属OPM[4,5,6,7,39]的增益。本研究使用柔性头盔安装4He-OPM传感器。由于4He-OPMs传感器在室温下工作,因此可以将传感器靠近头皮,优化的头盔设计甚至可能进一步增加信号幅度。
两个任务的结果显示,使用SQUID-MEG和4He-OPM获得的时间曲线之间存在高度相关性。对于两种传感器类型和4He-OPM信号的径向和切向分量,偏转的潜伏期高度相似。这在切向4He-OPM分量中最为显著。有趣的是,相较于径向4He-OPM分量,切向4He-OPM分量似乎还能捕捉到更多的视觉反应的后期成分,这表明切向分量可能提供额外的信息,因为它可以从不同的神经元群体中采样。考虑到我们使用一个模板主题对SQUID和OPM传感器进行共同注册,导致空间精度有限,这些结果是令人鼓舞的。
视觉刺激数据的时间频率分解显示出显著的 alpha/beta 和 gamma 振荡成分,这些成分在传感器类型之间非常相似,表明 4He-OPM 传感器可以探测到人类振荡神经范围内的振荡脑动力学变化。然而,尽管绝对信号振幅更高,但相对于基线的信号变化百分比在 4He-OPM 传感器与 SQUID-MEG 相比较低,特别是在更高的振荡(gamma)范围内。以前的研究结果已经显示出使用相对功率增加值等于或优于 SQUID-MEG 可以可靠地记录 gamma 频段的活动 [10]。我们研究中性能较低的原因可能不是传感器的限制,而是传感器放置在头部后部的原因。由于目前设计中连接 OPM 传感器的电缆相当大而沉重,并且结合了自由头部运动,这可能导致颈部区域的张力和随后的肌肉活动。肌肉收缩通常会导致数据中的高频(例如 gamma)成分,这可能会提高噪音水平。
常规SQUID-MEG和4He-OPM的信噪比存在明显重叠,尽管SQUID-MEG的SNR通常更高。这在某种程度上是可以预料的,因为4He-OPMs传感器的有效噪声级别高达45 fT/√Hz [26],或在我们的研究中<43 fT/√Hz,而SQUID-MEG的灵敏度为<3.4 fT/√Hz。当然,头皮到传感器的距离减少是一个缓解因素,从而使数据质量接近完全开发的SQUID-MEG。除了本质噪声之外,在比较本研究中使用的4He-OPM传感器和CTF SQUID-MEG系统的性能时需要考虑其他重要因素:OPM传感器是头戴式的,参与者产生的任何头部运动都会导致传感器的运动在减少但不均匀的磁场中。位于头部上方10厘米处的(单个)参考传感器捕获了这部分与运动相关的信号,但由于可能经历稍微不同的场和其运动与头皮传感器略有不同,因此它不像CTF集成参考传感器那样有效地减少环境噪声。此外,所述传感器的布线(将在下一个系统的迭代中进行优化)很可能不仅会引起肌肉收缩,还会引起传感器相对于头部的轻微移动。尽管现有研究中未记录头部运动,但我们观察到参与者之间数据质量存在显著变异,很可能归因于运动相关的伪影和/或传感器放置。在实验组中,一些参与者显示出与SQUID-MEG相等的4He-OPM数据质量,表明4He-OPM系统能够实现比SNR值目前反映的更高性能。显然,使用头戴式传感器以及自由头部运动的能力是使用OPM的关键好处,但它也可能解释为什么OPM系统的性能较低。另一个好处可能是与SQUID-MEG相比更一致的头皮距离,其中头部位置和形状相对于固定传感器位置存在相当大的差异[19]。这可能解释了相对于OPM系统发现的SQUID-MEG的SNR值的扩展范围的原因。在比较SQUID-MEG和OPM时要考虑的另一个因素是使用的传感器数量[40,41]。当前的4He-OPMs传感器在头皮上配备了四个传感器和一个参考传感器。 SQUID-MEG录音从275个传感器覆盖整个头部,并配备29个参考传感器阵列。与我们的4He-OPM设置相比,这允许更多的自由度来抑制伪影。
请注意,我们在研究中使用了简单的基于回归的技术,利用参考传感器消除环境噪音和运动伪像。为了进一步提高数据质量,除了增加传感器数量外,还可以采用更先进的技术,比如均匀场校正[42]和源重构技术,比如波束成形[43],来抑制非神经起源的信号。通过使用比以前研究所使用的更大的样本量,当前研究能够准确地估计传感器类型之间的组级对应,以及表征变异源。当前结果显示了向高质量、万能MEG系统发展的有3522集团的新网站的进展,没有传统低温SQUID-MEG的缺点。未来的努力将集中于实现轻量化的整头系统,这将允许大大改善降噪潜力以及扩展头部覆盖范围。
附录A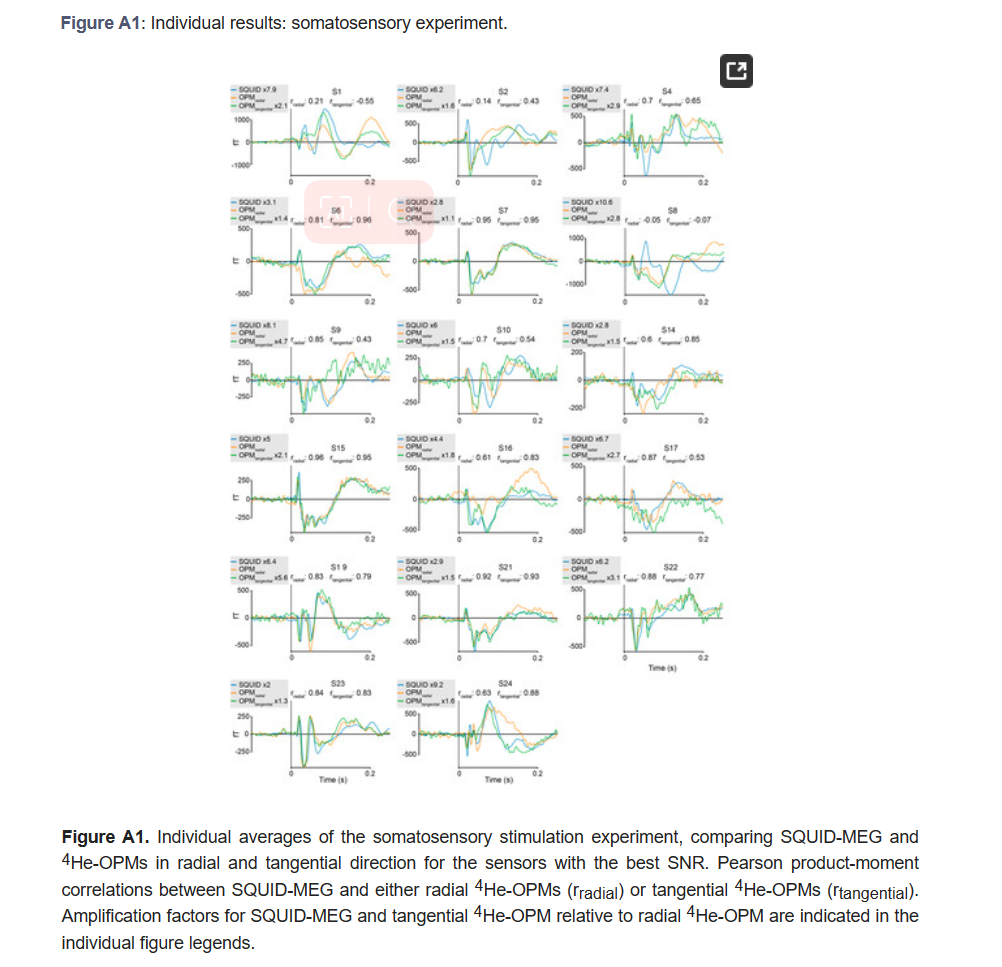
附录B
我们的4He-OPM使用的技术信息和物理原理总结如下。
一个高频(HF)放电(在10至20 MHz之间,消耗约10 mw功率)会将4He原子从它们的基态激发到亚稳三重态,该三重态拥有三个塞曼子能级。通过选择性的光泵浦(用一个线偏振光束调谐在1083 nm的D0线上)来实现宏观性质,使所有4He原子的磁矩对齐。
每个传感器在三个轴上都以闭环模式运行。这意味着通过使用三轴亥姆霍兹线圈施加相反的补偿场来连续取消每个传感器的磁场的三个分量。测量的磁场值和方向是从注入补偿线圈中的电流推导出来的。这种闭环模式减少了轴之间的串扰。最近,轴间投影误差(CAPE)被称为轴间串扰[21]。CAPE引入相位误差和传感轴倾斜。之前对碱OPM以开环模式操作的研究表明,在低频时轴的倾斜约为3.3°/nT[21],±3 nT的偏移变化会导致约5%的有效增益误差[6,18,46]。因此,据我们所知,4He-OPM是**个在每个轴上以闭环模式提供三个磁场分量测量的传感器,保证了测量的可靠性并避免了任何轴间投影误差的出现。另一个重要的优点也是扩大动态范围远远超过4He原子的磁共振线宽的可能性。目前,我们的4He-OPMs已经实现了±250 nT的动态范围。以闭环三轴模式操作的磁强计灵敏度在两个轴(一个径向和一个切向)上优于45 fT/√Hz(在本研究中为< 43 fT/√Hz),频带从直流到2 kHz。
然而,尽管闭环模式避免了交叉轴投影误差,但由于OPM阵列内传感器之间不可避免地存在交叉干扰,它仍存在一些不必要的后果。 只要交叉干扰得到适当表征,这个问题可以通过适当的后处理解决。 通过使用闭环多轴操作(有关详细描述,请参见[26]),测量相邻磁强计之间的交叉干扰的组合(交叉干扰矩阵),这一问题可以得到解决。 正如先前报道的那样,仅具有2毫米间距的四个4He-OPM传感器阵列的测量交叉干扰矩阵,相对于真实的OPM MEG记录设置非常不利,显示出低交叉干扰误差(<10%),并显示出与Biot-Savart计算估计矩阵的良好一致性。 知道这个交叉干扰矩阵,可以通过适当的后处理来纠正轻微的与交叉干扰相关的误差。
;){kind=link}